Research
During my master's period, my research work covers many aspects, including visual SLAM, autonomous vision control of UAV, visual navigation of unmanned vehicle, multi target detection and tracking. At present, I am more interested in multi-sensor fusion SLAM and deep learning, including open source excellent framework (ORB-SLAM, VINS-Mono, OKVIS) etc, and its applications in UAVs and unmanned vehicles.
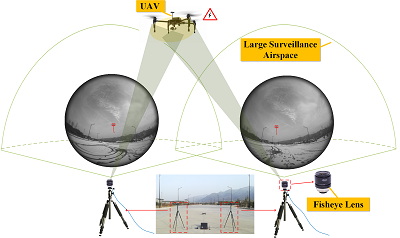
Panoramic UAV Surveillance System based on Structure-free Fisheye Camera Array
Tao Yang, Zhi Li, Jing Li, Bolin Xie
This paper presents a novel panoramic UAV surveillance system, which is based on an unique structure-free fisheye camera array, and has the capability of 3D detection and tracking multiple UAVs in a very wide field of view.
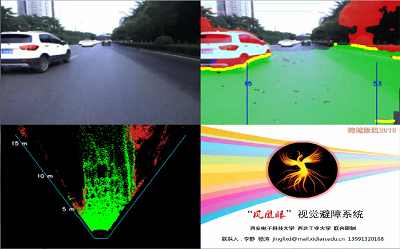
Monocular Vision SLAM-Based UAV Autonomous Landing in Emergencies and Unknown Environments
Tao Yang, Peiqi Li, Huiming Zhang, Jing Li, Zhi Li
This paper proposes and implements a monocular vision-based drone autonomous landing system in emergencies and in unstructured environments. In this system, a novel map representation approach is proposed that combines three-dimensional features and a mid-pass filter to remove noise and construct a grid map with different heights.
paper | website | video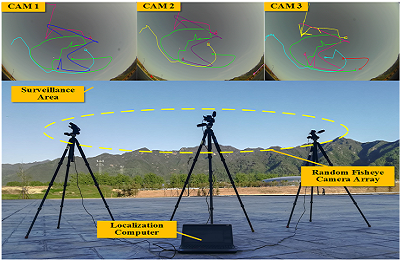
Anti-UAVs Surveillance System based on Ground Random Fisheye Camera Array
Zhi Li, Tao Yang, Jing Li, Zhuoyue Zhang, Ruikai Liu, Bolin Xie
This paper mainly focuses on monitoring various UAVs in unknown and GPS-denied wide areas. We innovatively construct a novel antiUAVs surveillance system based on ground random fisheye camera array.
paper | slide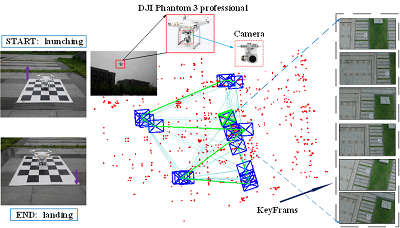
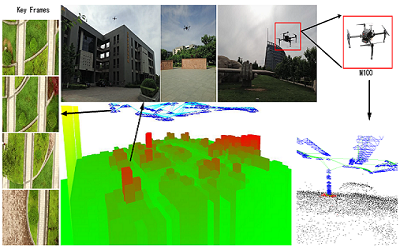
Geodetic Coordinate Calculation Based on Monocular Vision on UAV Platform
Zhi Li, Tao Yang, Guangpo Li, Jing Li, Yanning Zhang
This paper mainly studied a method of geodetic coordinate calculation based on monocular vision on UAV platform, which is extension and expansion of the traditional monocular vision measurement method. Our system only needs a monocular camera carried on UAV platform and combines the latest ORB-SLAM algorithm.
paper | slide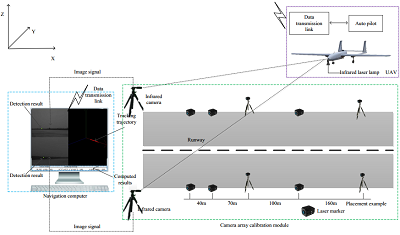
A Ground-Based Near Infrared Camera Array System for UAV Auto-Landing in GPS-Denied Environment
Tao Yang, Guangpo Li, Jing Li, Yanning Zhang, Xiaoqiang Zhang, Zhuoyue Zhang, Zhi Li
This paper proposes a novel infrared camera array guidance system with capability to track and provide real time position and speed of a fixed-wing Unmanned air vehicle (UAV) during a landing process.
paper | video